|
Новые успехи студентов АСП!
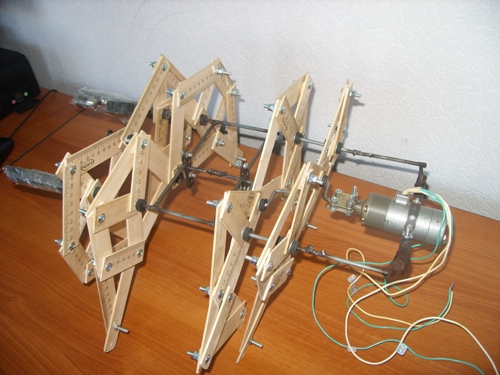
"Шагающий механизм"
Студентами группы АСП был разработан и реализован шагающий механизм, который воплощает передовые идеи в механике. В этой работе был рассмотрен особый тип роботов – шагающие машины (механизмы).
Шагающая машина должна использовать заложенные в принципе шагания возможности развязки движения корпуса машины от дороги. За счет изменения движения опор относительно корпуса шагающая машина может обеспечить комфортабельное (равномерное и прямолинейное) движение корпуса машины при перемещении по поверхности с неровностями, достигающими величины дорожного просвета машины.
Шагающий механизм позволяет перешагивать, перепрыгивать и двигаться с различной скоростью, в том числе галопом.
Облик наземного мобильного робота в первую очередь определяется типом и конструкцией движителя, служащего для преобразования в процессе взаимодействия с внешней средой усилия, получаемого от двигателя, в тяговое усилие, движущее транспортное средство.
Траектории движения.
Расчеты производились в Excel и на следующем слайде показано окно ввода исходных данных, изменяя значения которых получаются совершенно разные траектории.
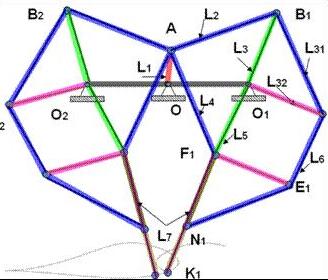
Размер ОА напрямую влияет на скорость. Чем больше значение, тем выше скорость передвижения шагающего механизма и наоборот. С физической точки зрения ОА представляет собой цилиндрический элемент, точнее радиус цилиндрического элемента. К этому цилиндрическому элементу крепятся ноги.
АВ1 и AF1 представляют собой стороны треугольника с основанием O1F1+O1B1, поэтому увеличение или уменьшении сторон должны быть в соответствии с основанием, иначе произойдет деформация конструкции.
B1D1 – является стороной треугольника L32L31L3,
O1D1 – визуально сужает и расширяет ногу, так как блок О1D1В1 остается «жестким»,.
E1N1 – усиливает конструкцию.
F1K1 – увеличивает высоту конструкции, эффект получается, как хождение на ходулях.



|




































































